forked from Telos4/RoboRally
20 lines
1.1 KiB
Markdown
20 lines
1.1 KiB
Markdown
# RoboRally
|
|
|
|

|
|
|
|
This project aims to provide a low-cost framework for automatic control experiments with small two-wheeled robots.
|
|
|
|
It consists of a list of components, step-by-step assembly instructions and the necessary software for getting started with robot control.
|
|
|
|
Here's a demonstration video of what is possible with these robots:
|
|
|
|
[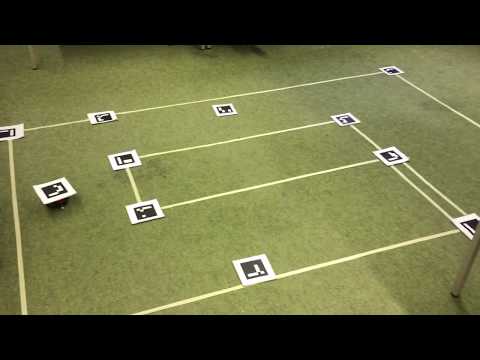](http://www.youtube.com/watch?v=u44QiJX27_s)
|
|
|
|
|
|
The project aims to be as affordable as possible. The total cost for a single robot is about 30 € or 35 $. This means you can easily build several of them e.g. for doing swarm robotics or cooperative robot experiments.
|
|
|
|
### Getting started ###
|
|
For assembly instructions for the robots see the files int the docs/ subfolder of the repository.
|
|
The first one is [1_ASSEMBLY.md](https://imaginaerraum.de/git/Telos4/RoboRally/src/branch/master/docs/1_ASSEMBLY.md) which explains what components to get and how to assemble them into a robot.
|
|
|